Dynamo 概述#
創建於: 2025年6月13日 | 最後更新於: 2025年6月13日
在閱讀本節之前,請先閱讀 torch.compiler。
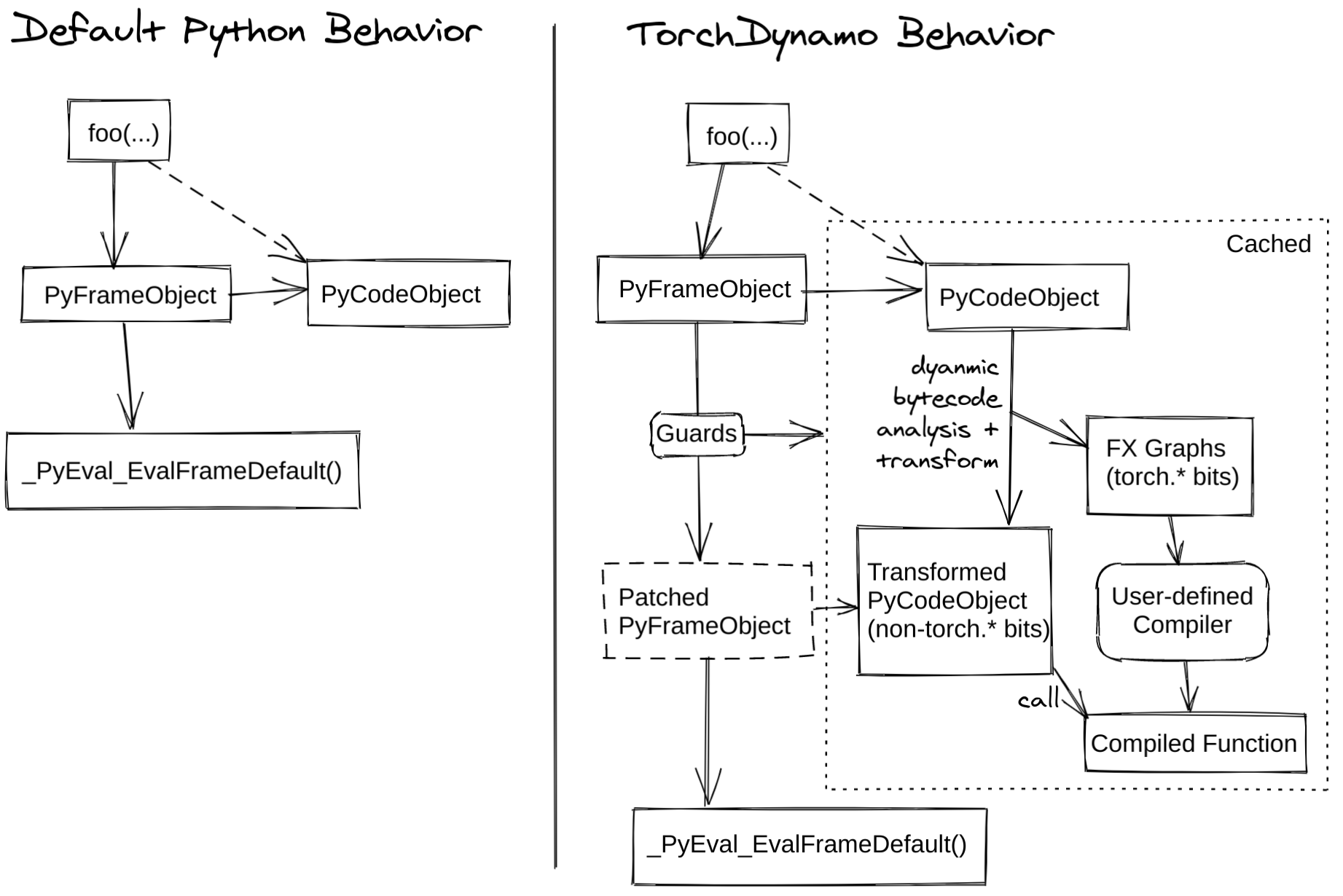
TorchDynamo(或簡稱 Dynamo)是一個 Python 級別的即時(JIT)編譯器,旨在加速未修改的 PyTorch 程式。Dynamo 掛鉤到 CPython 的幀評估 API(PEP 523),在 Python 位元組碼執行前動態修改它。它重寫 Python 位元組碼,將一系列 PyTorch 操作提取到一個 FX Graph 中,然後使用可定製的後端進行編譯。它透過位元組碼分析建立這個 FX Graph,並旨在將 Python 執行與編譯後的後端結合起來,以獲得最佳的雙重優勢——可用性和效能。
Dynamo 使透過單行裝飾器 `torch._dynamo.optimize()`(為方便起見由 `torch.compile()` 包裝)輕鬆嘗試不同的編譯器後端來加速 PyTorch 程式碼。
下圖演示了 PyTorch 在有和沒有 `torch.compile` 的情況下是如何工作的
`TorchInductor` 是 `Dynamo Graph` 支援的後端之一,它將圖轉換為用於 GPU 的 Triton 或用於 CPU 的 C++/OpenMP。我們有一個 訓練效能儀表盤,提供了不同訓練後端的效能比較。您可以在 PyTorch dev-discuss 上的 TorchInductor 帖子 中閱讀更多內容。
有關深入的概述,請閱讀以下章節,觀看深度解析影片,並檢視 dev-discuss 主題。
Dynamo 內部結構#
作者:Jason Ansel 和 Kaichao You
本節將介紹 Dynamo 的一些內部結構,並演示 Dynamo 的工作原理。
什麼是 guard?#
Dynamo 即時執行,並根據動態屬性對圖進行特化。下面是一個使用 Dynamo 的基本示例。可以使用 `torchdynamo.optimize` 裝飾函式或方法來啟用 Dynamo 最佳化。
from typing import List
import torch
from torch import _dynamo as torchdynamo
def my_compiler(gm: torch.fx.GraphModule, example_inputs: List[torch.Tensor]):
print("my_compiler() called with FX graph:")
gm.graph.print_tabular()
return gm.forward # return a python callable
@torchdynamo.optimize(my_compiler)
def toy_example(a, b):
x = a / (torch.abs(a) + 1)
if b.sum() < 0:
b = b * -1
return x * b
for _ in range(100):
toy_example(torch.randn(10), torch.randn(10))
例如,上面的第一個圖具有以下 guards:
GUARDS:
hasattr(L['a'], '_dynamo_dynamic_indices') == False
hasattr(L['b'], '_dynamo_dynamic_indices') == False
utils_device.CURRENT_DEVICE == None
___skip_backend_check() or ___current_backend() == ___lookup_backend(140355900538256)
check_tensor(L['a'], Tensor, DispatchKeySet(CPU, BackendSelect, ADInplaceOrView, AutogradCPU), torch.float32, device=None, requires_grad=False, size=[10], stride=[1])
check_tensor(L['b'], Tensor, DispatchKeySet(CPU, BackendSelect, ADInplaceOrView, AutogradCPU), torch.float32, device=None, requires_grad=False, size=[10], stride=[1])
如果任何一個 guard 失敗,圖將被重新捕獲和重新編譯。其中有趣的 guard 是 `check_tensor`,它會檢查以下 `torch.Tensor` 屬性:
張量的 Python 類(張量子類化等)
dtype
device
requires_grad
dispatch_key(應用了執行緒區域性包含/排除)
ndim
sizes*
strides*
完整的特化模式允許後端編譯器假定一個完全靜態的圖。不幸的是,大多數後端都需要這樣。返回動態形狀的運算子在非動態形狀模式下會觸發圖中斷。
Dynamo 在做什麼?#
如果您想更好地理解 Dynamo 在做什麼,可以執行您的程式碼:
TORCH_LOGS="+dynamo,guards,bytecode"
如果您不熟悉 Python 位元組碼,可以新增一個反編譯器鉤子,將位元組碼反編譯為人類可讀的原始碼。一個可用的工具是 depyf。如果您尚未安裝 `depyf`,請執行 `pip install depyf`。然後在執行任何程式碼之前,新增以下程式碼來安裝反編譯鉤子:
import depyf
depyf.install()
這段程式碼會觸發有用的(但很囉嗦的)列印輸出。
例如,`toy_example` 中第一個圖的列印輸出是:
__compiled_fn_0 <eval_with_key>.1
opcode name target args kwargs
------------- ------- ------------------------------------------------------ ---------------- --------
placeholder a a () {}
placeholder b b () {}
call_function abs_1 <built-in method abs of type object at 0x7f9ca082f8a0> (a,) {}
call_function add <built-in function add> (abs_1, 1) {}
call_function truediv <built-in function truediv> (a, add) {}
call_method sum_1 sum (b,) {}
call_function lt <built-in function lt> (sum_1, 0) {}
output output output ((truediv, lt),) {}
ORIGINAL BYTECODE toy_example example.py line 12
14 0 LOAD_FAST 0 (a)
2 LOAD_GLOBAL 0 (torch)
4 LOAD_METHOD 1 (abs)
6 LOAD_FAST 0 (a)
8 CALL_METHOD 1
10 LOAD_CONST 1 (1)
12 BINARY_ADD
14 BINARY_TRUE_DIVIDE
16 STORE_FAST 2 (x)
15 18 LOAD_FAST 1 (b)
20 LOAD_METHOD 2 (sum)
22 CALL_METHOD 0
24 LOAD_CONST 2 (0)
26 COMPARE_OP 0 (<)
28 POP_JUMP_IF_FALSE 19 (to 38)
16 30 LOAD_FAST 1 (b)
32 LOAD_CONST 3 (-1)
34 BINARY_MULTIPLY
36 STORE_FAST 1 (b)
17 >> 38 LOAD_FAST 2 (x)
40 LOAD_FAST 1 (b)
42 BINARY_MULTIPLY
44 RETURN_VALUE
MODIFIED BYTECODE toy_example example.py line 12
12 0 LOAD_GLOBAL 3 (__compiled_fn_0)
2 LOAD_FAST 0 (a)
4 LOAD_FAST 1 (b)
6 CALL_FUNCTION 2
8 UNPACK_SEQUENCE 2
10 STORE_FAST 2 (x)
12 POP_JUMP_IF_FALSE 12 (to 24)
14 LOAD_GLOBAL 4 (__resume_at_30_1)
16 LOAD_FAST 1 (b)
18 LOAD_FAST 2 (x)
20 CALL_FUNCTION 2
22 RETURN_VALUE
>> 24 LOAD_GLOBAL 5 (__resume_at_38_2)
26 LOAD_FAST 1 (b)
28 LOAD_FAST 2 (x)
30 CALL_FUNCTION 2
32 RETURN_VALUE
possible source code:
def toy_example(a, b):
__temp_1 = __compiled_fn_0(a, b)
x = __temp_1[0]
if __temp_1[1]:
return __resume_at_30_1(b, x)
return __resume_at_38_2(b, x)
If you find the decompiled code is wrong,please submit an issue at https://github.com/youkaichao/depyf/issues.
頂部是 FX 圖。接下來是函式的原始位元組碼,然後是 Dynamo 生成的修改後的位元組碼,以及用於參考的反編譯原始碼。最後是上面介紹的 guards。
在修改後的位元組碼中,`__compiled_fn_0` 是 `my_compiler()`(編譯後的圖)的返回值。`__resume_at_30_1` 和 `__resume_at_38_2` 都是生成的繼續函式,用於在圖中斷後恢復執行(在位元組碼偏移量 30 和 38 處)。這些函式中的每一個都採用以下形式:
__resume_at_<offset>:
... restore stack state if needed ...
JUMP_ABSOLUTE <offset> into toy_example
... original bytecode of toy_example ...
透過生成這個 `resume_at` 函式,我們強制函式剩餘部分在一個新的 Python 幀中執行,該幀會遞迴地觸發 Dynamo 在執行第一次到達該點時重新開始捕獲。
如何檢查 Dynamo 生成的構件?#
要檢查 Dynamo 生成的構件,有一個 API `torch._dynamo.eval_frame._debug_get_cache_entry_list`,它可以從函式的 `__code__` 物件中檢索編譯後的程式碼和 guards。一個編譯後的函式可以有多個快取條目,每個快取條目包含一個用於檢查 guards 的生成函式,以及一個 `types.CodeType` 物件,用於在滿足 guarding 條件時執行程式碼。
from torch._dynamo.eval_frame import _debug_get_cache_entry_list, innermost_fn
cache_entries = _debug_get_cache_entry_list(innermost_fn(toy_example))
cache_entry = cache_entries[0]
guard, code = cache_entry.check_fn, cache_entry.code
# the guard takes the local variables of an input frame, and tells whether a re-compilation should be triggered.
import dis
dis.dis(guard)
dis.dis(code)
如果您瞭解 Python 位元組碼,就能理解上面的輸出。
對於 guard 函式,無需檢查位元組碼。我們可以直接訪問其 guarding 條件:
for code_part in guard.code_parts:
print(code_part)
輸出是:
___guarded_code.valid
___check_global_state()
hasattr(L['a'], '_dynamo_dynamic_indices') == False
hasattr(L['b'], '_dynamo_dynamic_indices') == False
utils_device.CURRENT_DEVICE == None
___skip_backend_check() or ___current_backend() == ___lookup_backend(140215810860528)
___check_tensors(L['a'], L['b'], tensor_check_names=tensor_check_names)
只有當所有條件都滿足時,guard 函式才返回 true,並且執行編譯後的程式碼。
對於編譯後的程式碼,我們無法直接訪問其原始碼,只能對其進行反編譯。
from depyf import decompile
print(decompile(code))
輸出是:
def toy_example(a, b):
__temp_1 = __compiled_fn_0(a, b)
x = __temp_1[0]
if __temp_1[1]:
return __resume_at_30_1(b, x)
return __resume_at_38_2(b, x)
程式碼中引用的某些名稱是:
編譯後的函式,儲存在包含原始函式 `toy_example` 的模組的全域性名稱空間中。這些名稱包括 `__compiled_fn_0` / `__resume_at_30_1` / `__resume_at_38_2`。
用於檢查 guards 的閉包變數。名稱可以從 `guard.__code__.co_freevars` 訪問,值儲存在 `guard.__closure__` 中。這些名稱包括 `___guarded_code` / `___is_grad_enabled` / `___are_deterministic_algorithms_enabled` / `___is_torch_function_enabled` / `utils_device` / `___check_tensors` / `tensor_check_names`。
`guard` 函式的引數 `L`。這是一個字典,將 `toy_example` 的引數名對映到其值。這僅在函式呼叫時可用,此時會涉及幀評估 API。簡而言之,`L` 是一個結構為 `{'a': value_a, 'b': value_b}` 的字典。因此,您可以看到程式碼使用 `L['a']` 來引用輸入變數 `a`。
在編譯後的 `toy_example` 程式碼中顯示了圖中斷,我們必須使用 Python 直譯器來選擇以下圖進行執行。
請注意,我們傳遞了一個簡單的 `my_compiler` 函式作為後端編譯器,因此子圖程式碼 `__resume_at_38_2`、`__resume_at_30_1` 和 `__compiled_fn_0` 仍然是 Python 程式碼。這也可以進行檢查(請忽略函式名,只使用函式簽名和函式體程式碼)。
print("source code of __compiled_fn_0:")
print(innermost_fn(__compiled_fn_0).__self__.code)
print("=" * 60)
print("source code of __resume_at_30_1:")
print(decompile(__resume_at_30_1))
print("=" * 60)
print("source code of __resume_at_38_2:")
print(decompile(__resume_at_38_2))
source code of __compiled_fn_0:
def forward(self, L_a_ : torch.Tensor, L_b_ : torch.Tensor):
l_a_ = L_a_
l_b_ = L_b_
abs_1 = torch.abs(l_a_)
add = abs_1 + 1; abs_1 = None
truediv = l_a_ / add; l_a_ = add = None
sum_1 = l_b_.sum(); l_b_ = None
lt = sum_1 < 0; sum_1 = None
return (truediv, lt)
# To see more debug info, please use ``graph_module.print_readable()``
============================================================
source code of __resume_at_30_1:
def <resume in toy_example>(b, x):
b = b * -1
return x * b
============================================================
source code of __resume_at_38_2:
def <resume in toy_example>(b, x):
return x * b
但是,如果我們使用 `inductor` 等內建後端,子圖程式碼將被編譯成 GPU 的 CUDA 核心或 CPU 的 C++ 程式碼。
總而言之,編譯後的程式碼在概念上等同於以下程式碼:
def compiled_example(a, b):
L = {'a': a, 'b': b}
for guard, code in get_cache_entries():
if guard(L):
return code(a, b)
recompile_and_add_another_cache_entry()
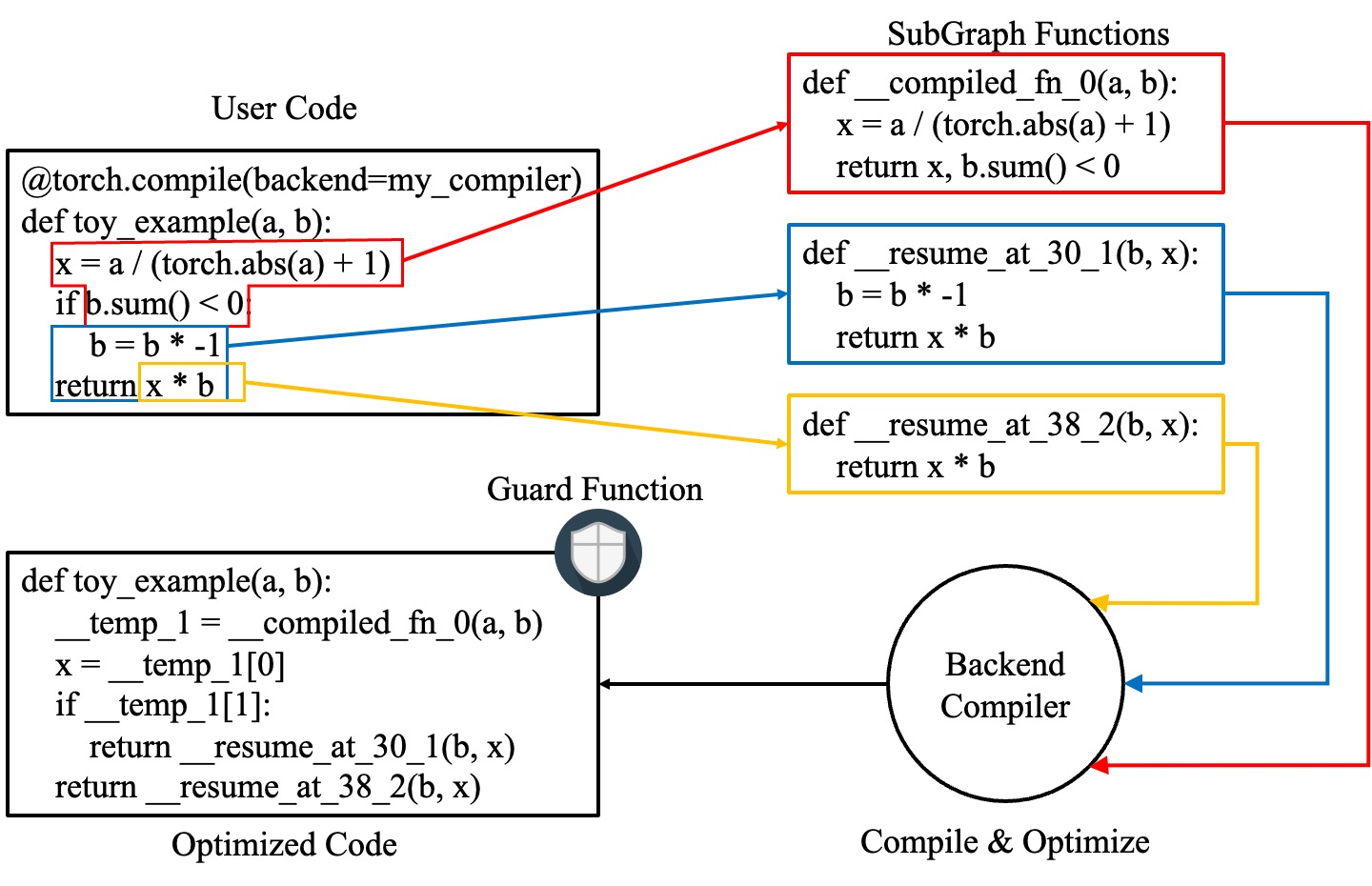
下圖演示了 `torch.compile` 如何轉換和最佳化使用者編寫的程式碼:它首先從使用者編寫的函式中提取計算圖,將這些圖編譯成最佳化後的函式,然後將它們組裝成一個新函式,該函式在功能上等同於使用者編寫的程式碼,但經過最佳化,具有良好的計算速度。
要詳細瞭解所有這些的內部實現,請參閱 Dynamo Deep-Dive。
